DYNAMIC LIVING


Personal work
May2022-Dec2022
Keywords
Architectural Robot, Self-adaptive, Tensegrity
Technique
Lidar Scanning, Cloud point, Penumatic Device, Digital knitting
May2022-Dec2022
Keywords
Architectural Robot, Self-adaptive, Tensegrity
Technique
Lidar Scanning, Cloud point, Penumatic Device, Digital knitting
To form the concept of so-called "cities," human habits should not be completely separated from the natural environment. This project proposes a new approach to the division of human living space: to find a new way of dividing space that is dynamic and responsive to the natural environment, starting with the optimal human-nature relationship.
Space is not designed, it's found.
- This project proposes a new approach to human living space planning.
“Architecture is never fixed. It is always affected by the environment, time, or people. So, I want to make new types of flexibilities in such a way that my architecture can be redefined and used differently. I want my architecture to be loose, so there are many interpretations.”
-Junya Ishigami


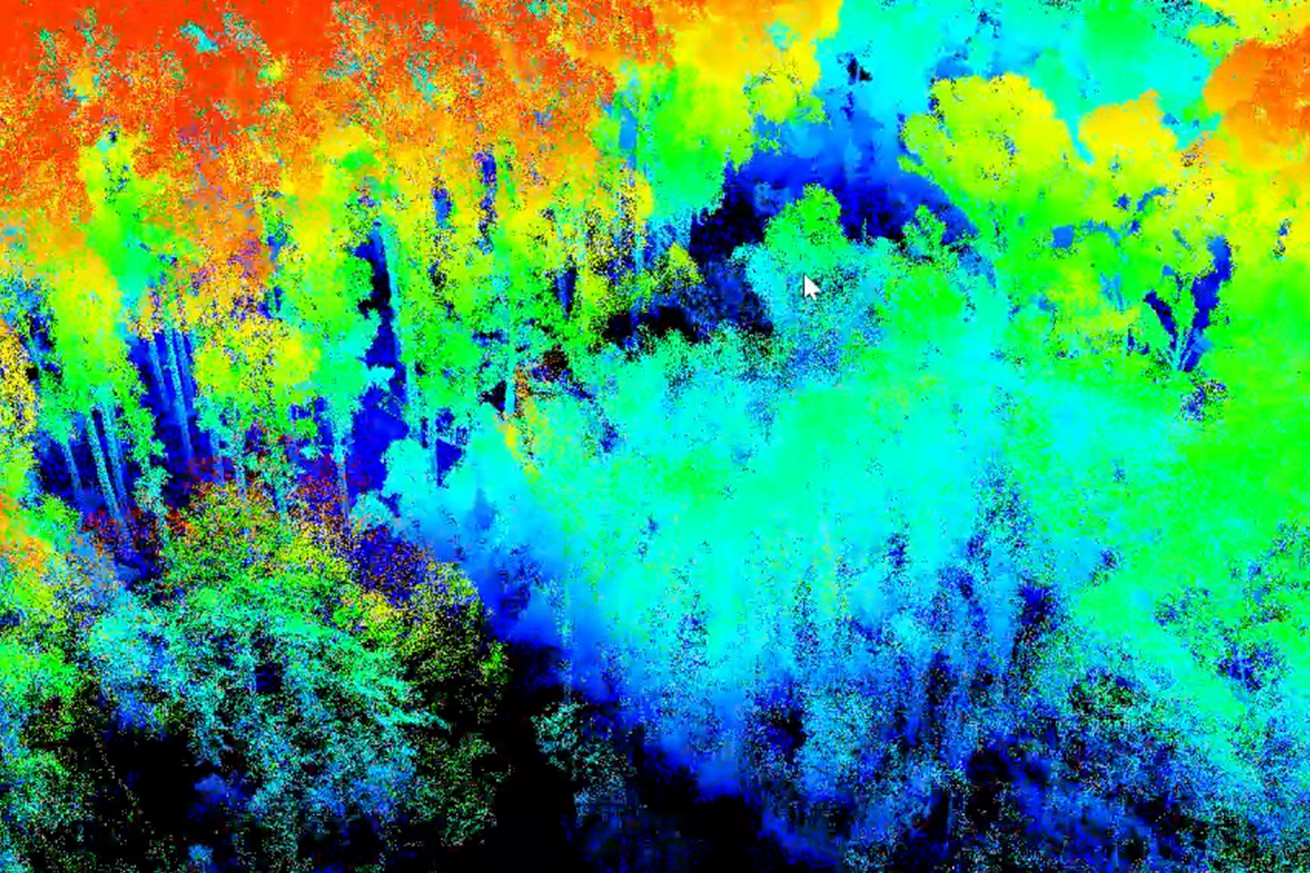
Photograph of real forest, Ningbo, 11/21/2022
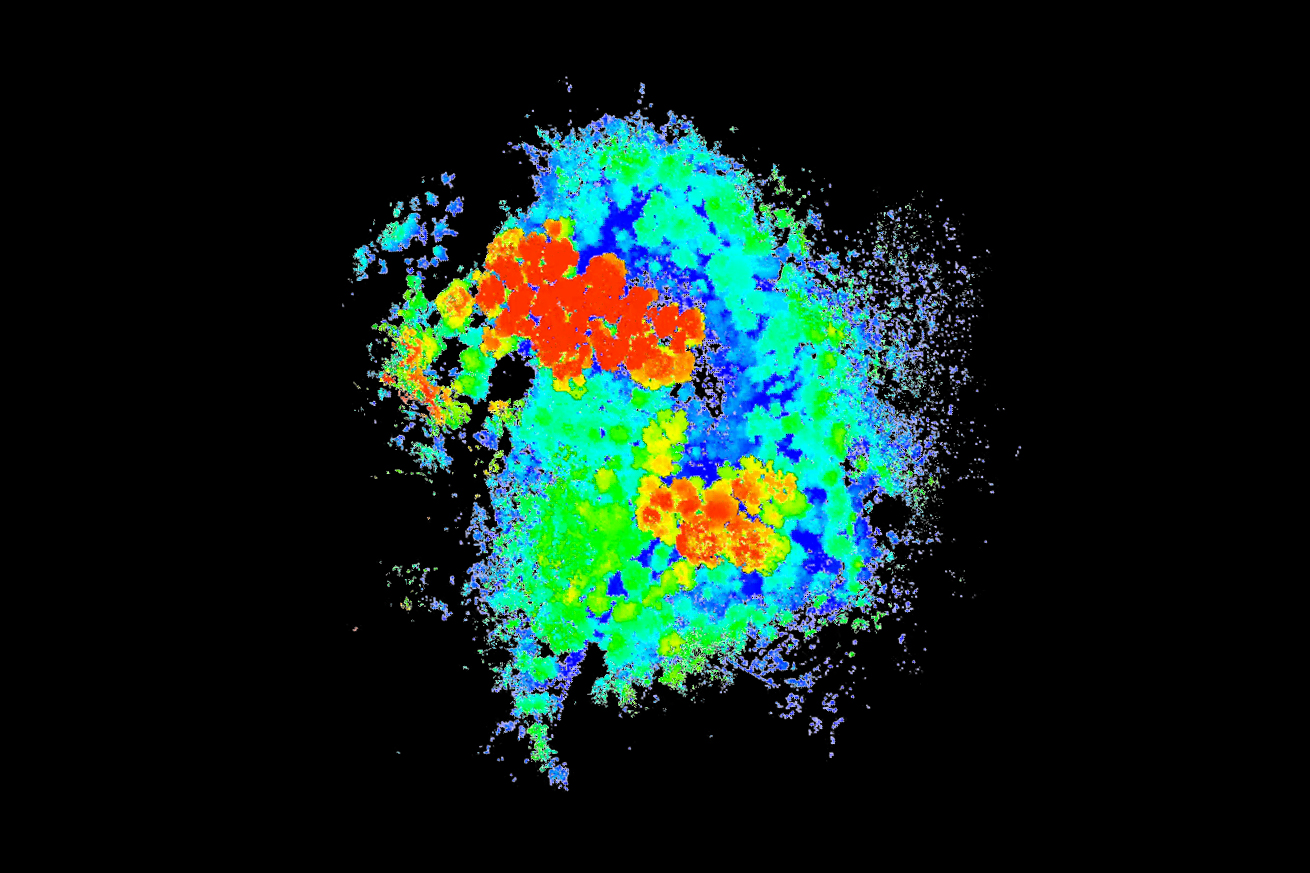
Point cloud data obtained by scanning real forest
Dynamic house is a dynamic building robot that adapts itself to the ambient temperature. The pneumatic skeleton is driven by an outdoor temperature sensor to change the size of the pores in the knitted fabric on the surface and regulate the room temperature.
1. Project Workflow

2. Project Background
The traditional space in which people live nowadays has always been static and artificially divided, but the space in nature is always dynamic. Human beings are born in nature and should follow nature, and the habitat of human beings should not be cut off from nature to form the so-called "city".
Traditional urban architecture tends to isolate people from nature. Whether it is the macro urban agglomeration and nature's obvious demarcation line, or indoor and outdoor by the hard "right angle", "white wall" division.
This makes human beings less and less influenced by nature and the outdoors, and it seems that living in the city, with doors and windows closed, nature or the outdoors are no longer relevant to the occupants of the house, and in my opinion, such an isolated and depressing atmosphere does not in fact correspond to the natural needs of human beings.


36 years of urban change in one of the districts of Ningbo City, Zhejiang Province, China [1]
3. Data Collection: Forest Model Data
Forest point cloud scanning
Acquisition of whole forest point cloud data using LiDAR scanning.
Location:Ningbo City, Zhejiang Province, China
Acquisition of whole forest point cloud data using LiDAR scanning.
Location:Ningbo City, Zhejiang Province, China
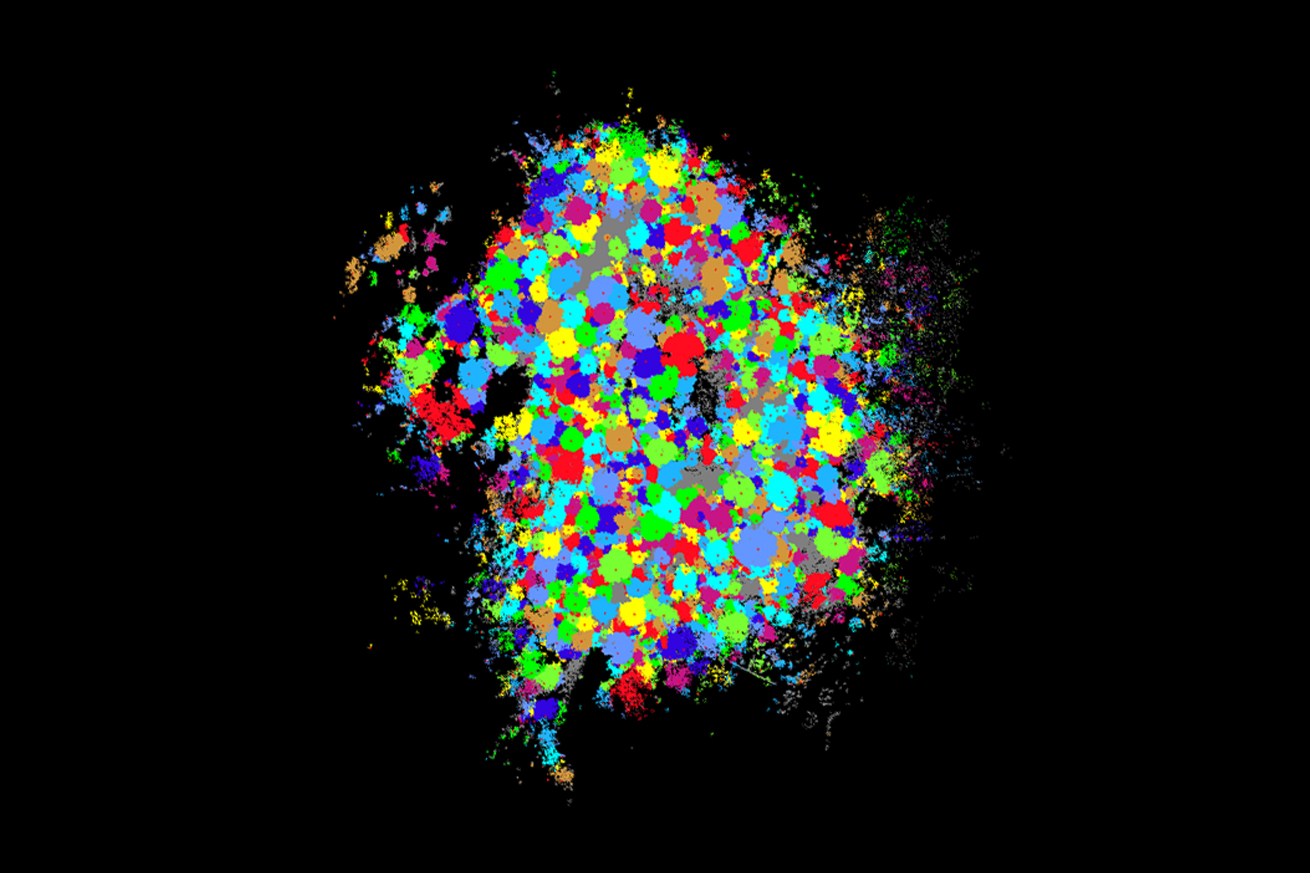
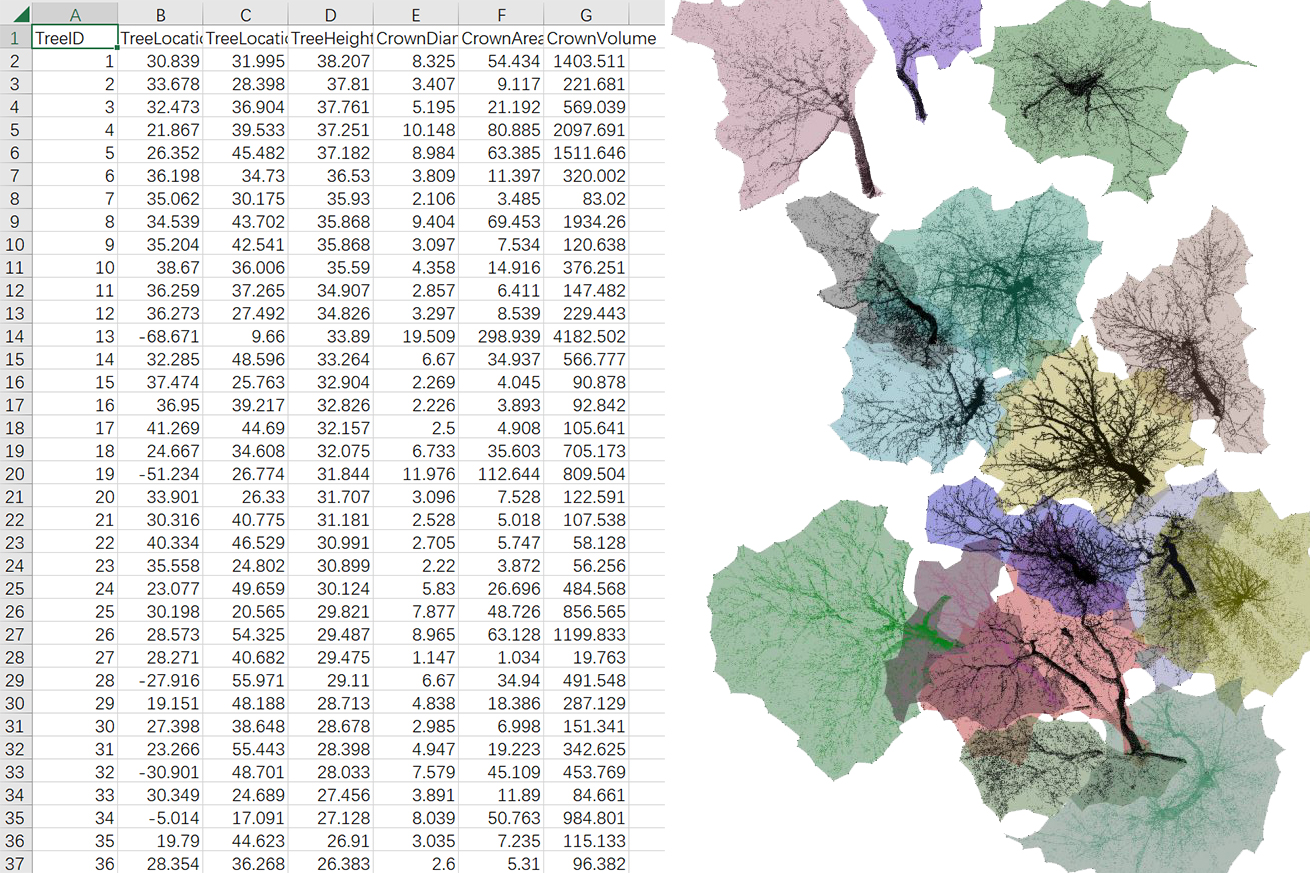
Single tree analysis
The point cloud data was analyzed using LiDAR360 to obtain the two-dimensional coordinates of each tree.
The point cloud data was analyzed using LiDAR360 to obtain the two-dimensional coordinates of each tree.
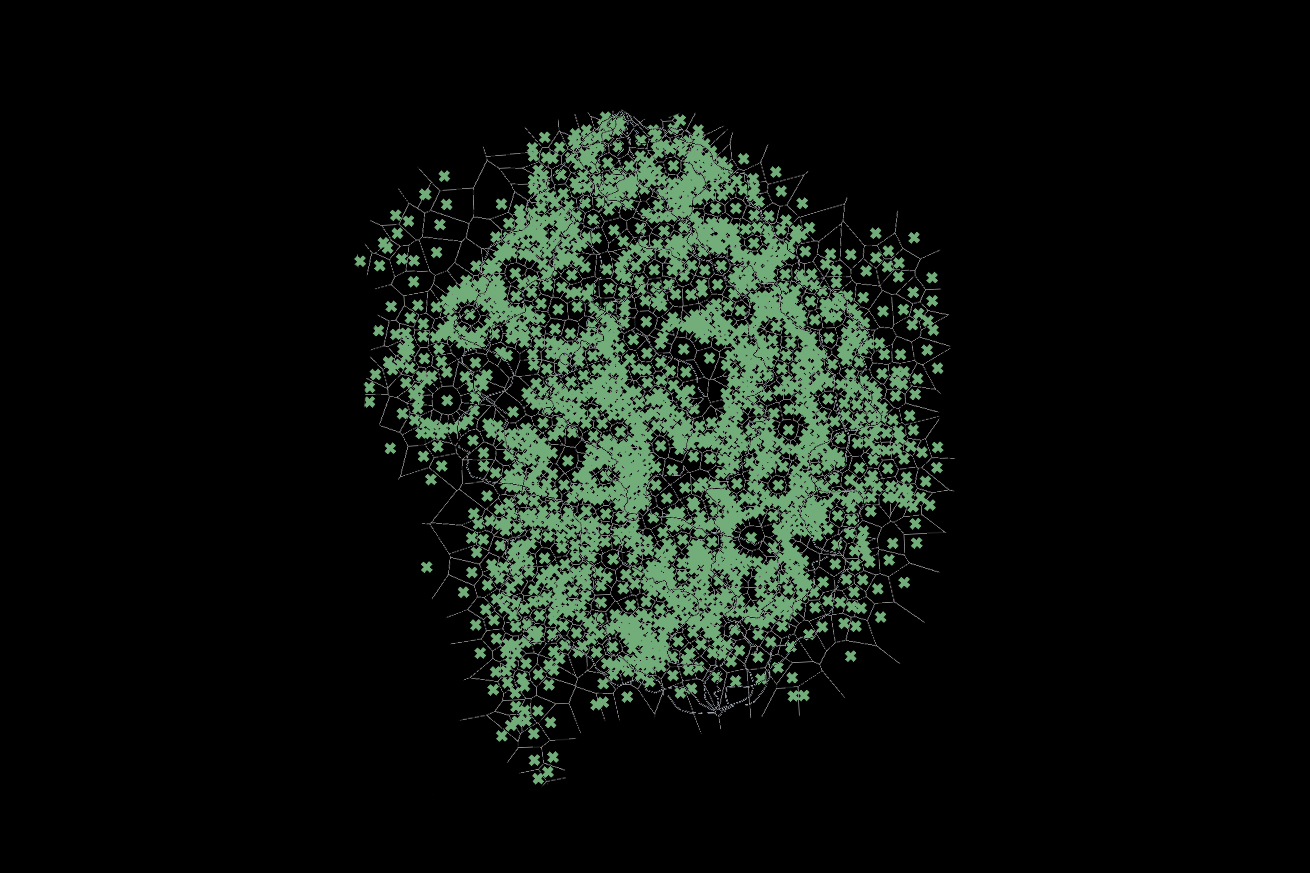
Forest tree coordinates
Getting the 2D coordinates of each tree in the whole forest.
Getting the 2D coordinates of each tree in the whole forest.
4. Data Collection: Human Walking Path
Path Restoration
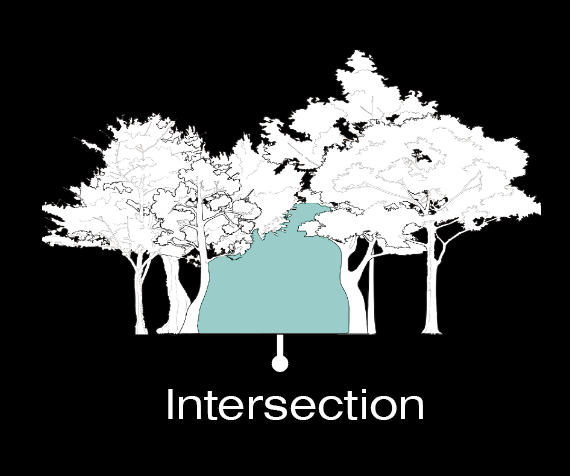
The intersection of the negative space delineated by the tree and the human path from the whole space needs to be separated.
Trees are born as space dividers, and people create paths based on thermal comfort and walking freedom, both of which are examples of nature assisting us in finding space.


-----------------------------------------------------------------------------------------------------------------------------
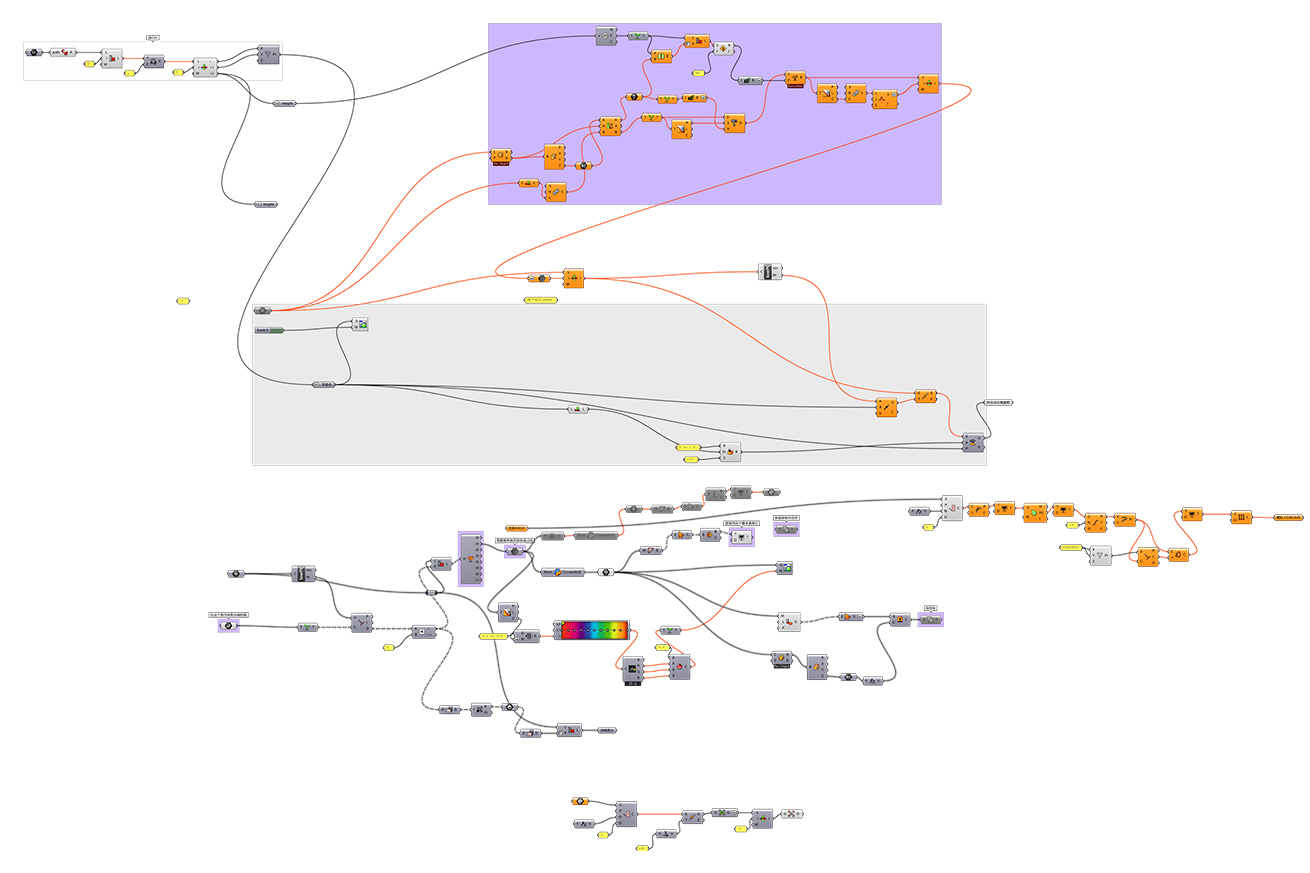
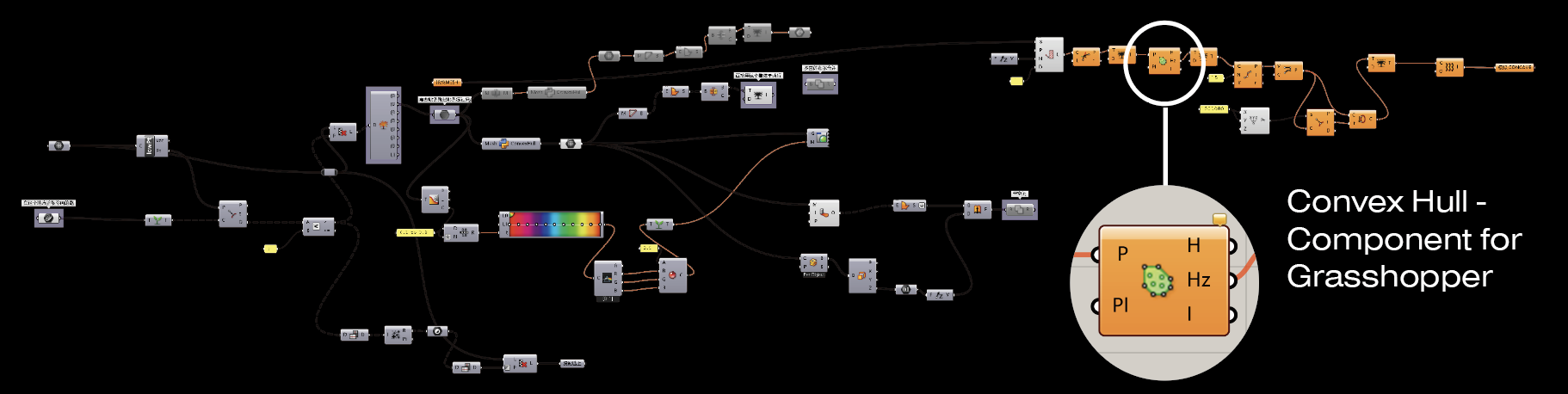
Data Processing - Convex Hull


ConvexFromPoints – Compute a convex mesh from a set of points.
The forest point cloud data on the path is computationally analyzed using the convex hull algorithm in grasshopper, which geometrically summarizes the point cloud data into a combination of low surfaces.

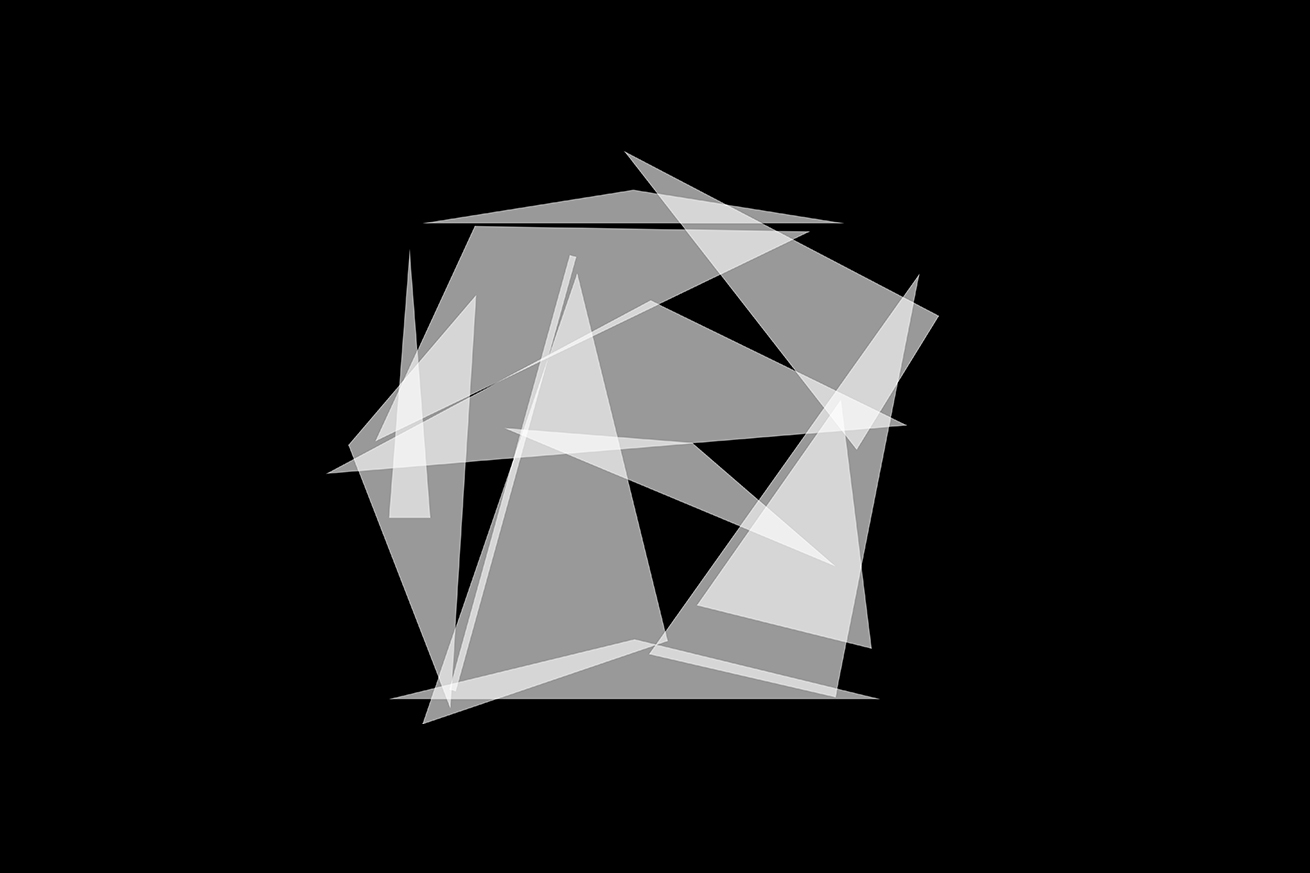
5. Model Simplification: “Mondrian Evolution”
The model is continuously simplified by reducing the number of similar vertices until it is reduced to a series of connected tension structures.



Expressionism
Evening: The Red Tree, 1908
Evening: The Red Tree, 1908
Cubism
The Gray Tree,1912
The Gray Tree,1912
From cubsim to neoplasticism
Composition with Color Planes and Gray Lines 1, 1918
Composition with Color Planes and Gray Lines 1, 1918
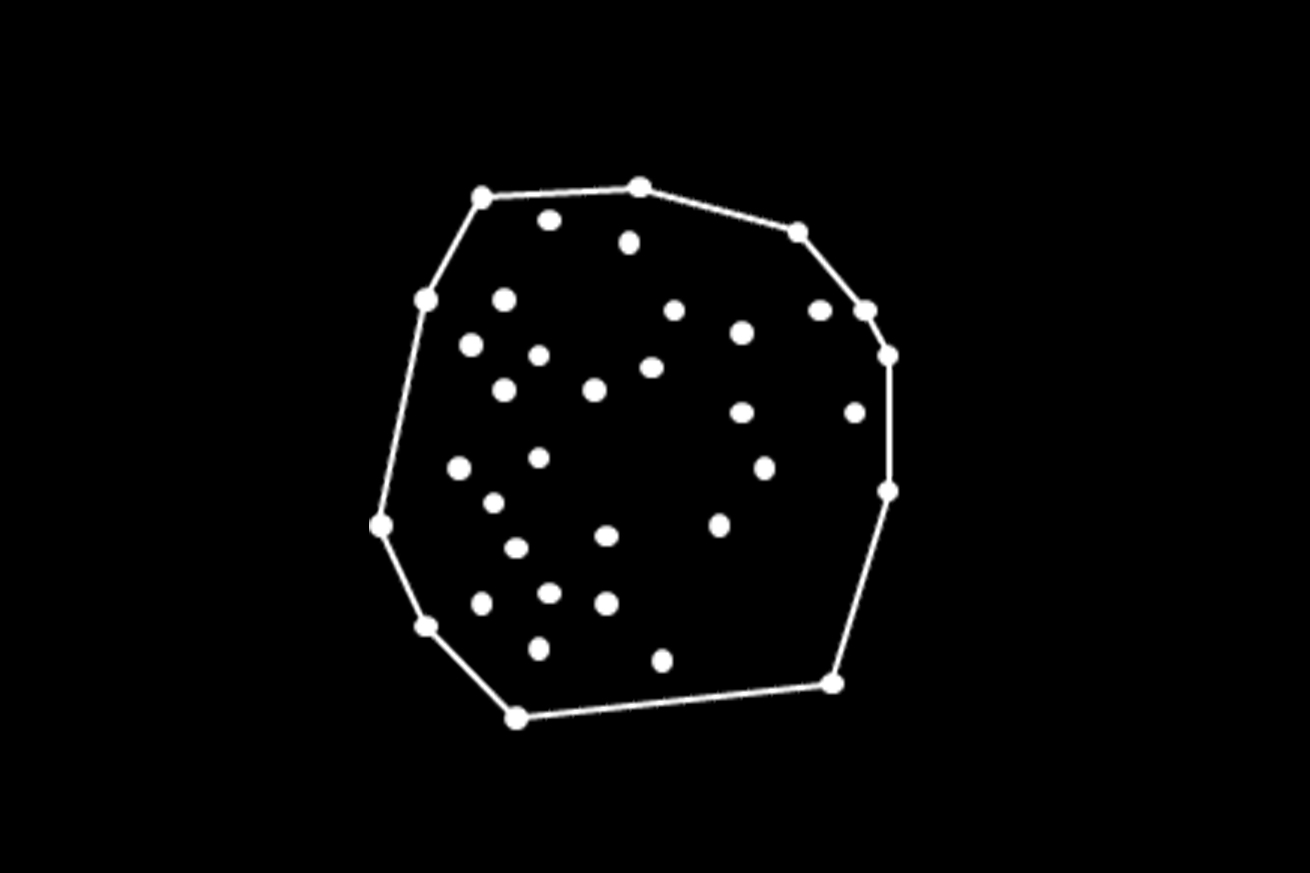
Computing a convex mesh from a set of points.
Connecting the 4 most convex vertices in each convex hull
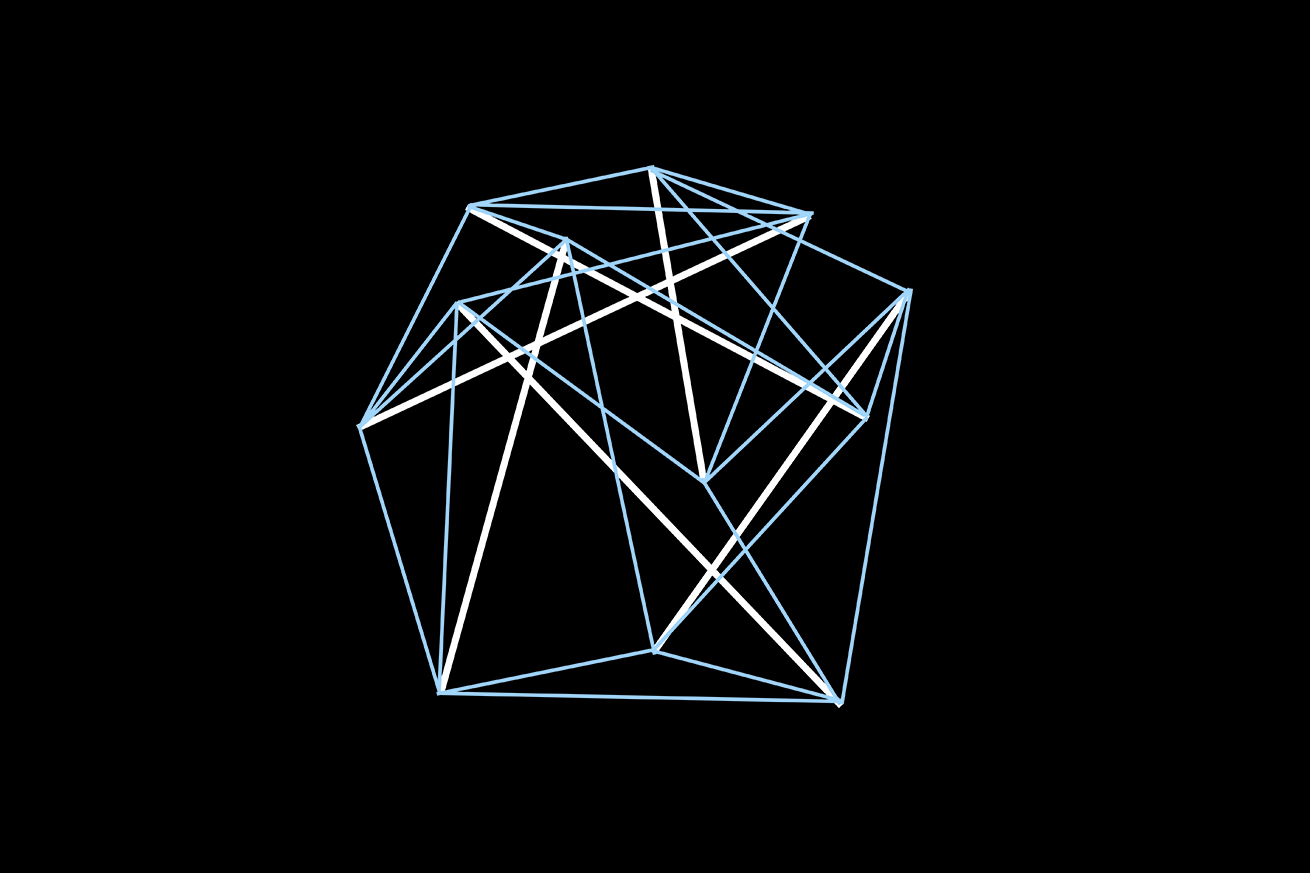
Generalized into a geometry that conforms to the tensioned structure
----------------------------->
***
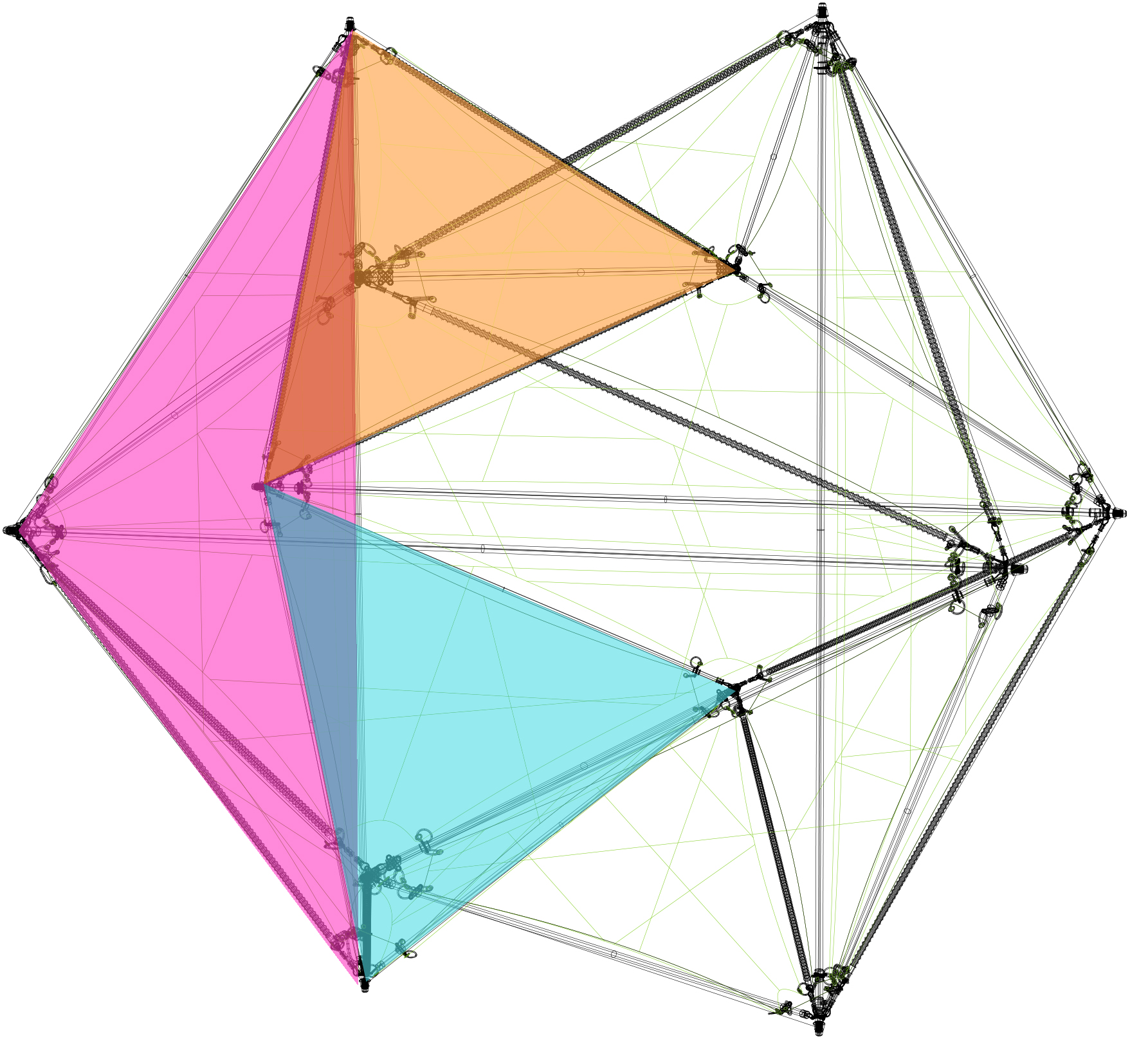
Final evolutionary model consisting of multiple tensioned structures

6. Model prototyping: Tensile Structure

Substantiation of the final model summarized in grasshopper
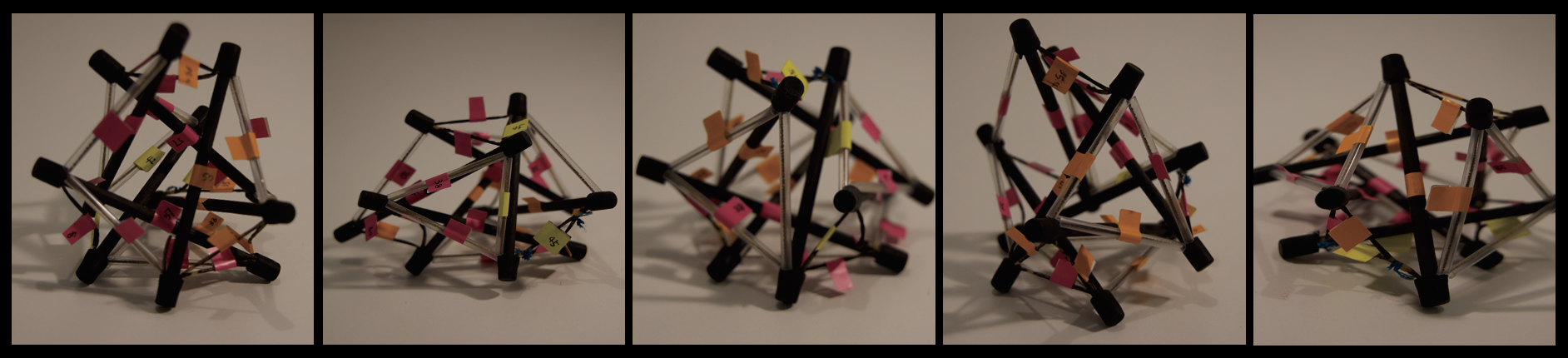
Different variants of a standard tensioning structure produced by varying the length of the elastic rope
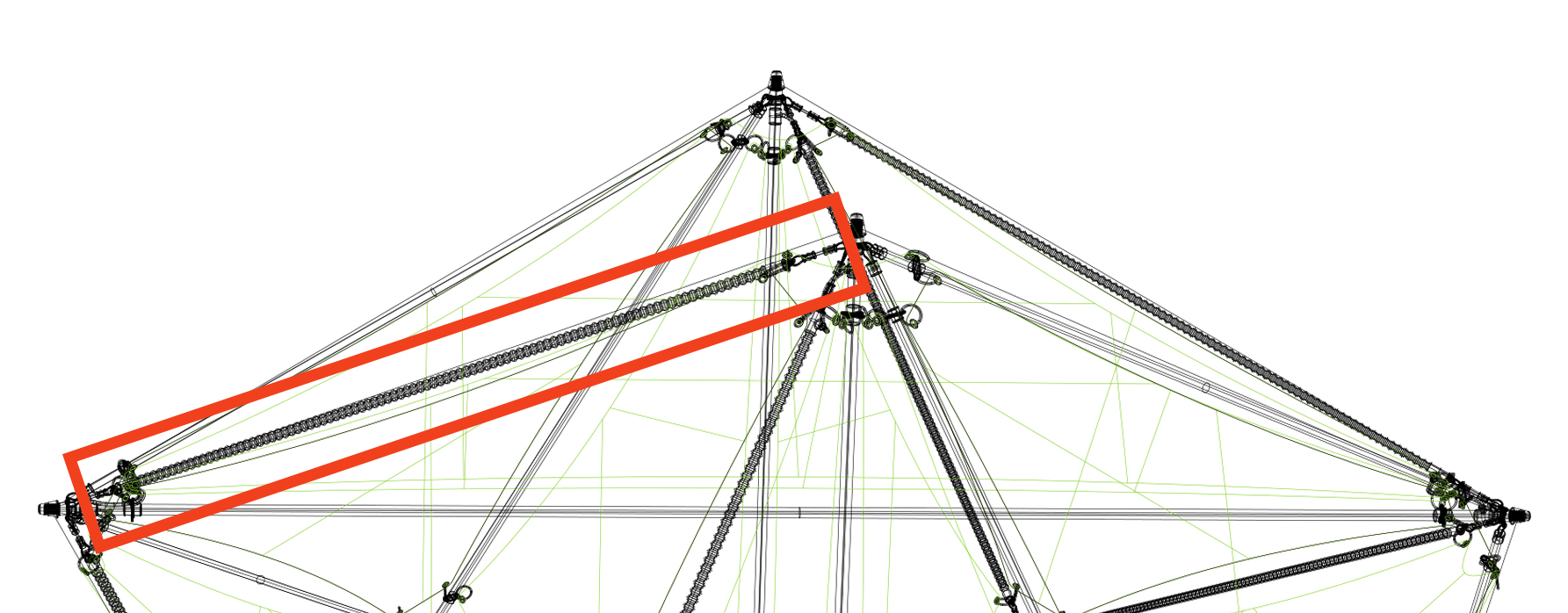
Robot Motion Principle
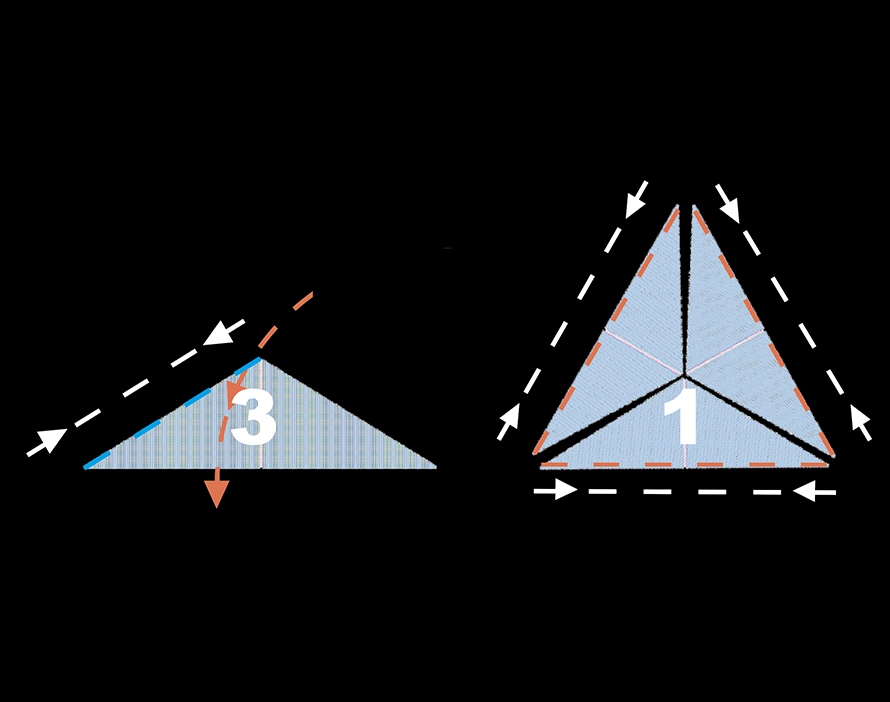
A standard tensioned structure consists of two types of triangles:
Isosceles Triangle (1, 2)
Equilateral Triangle (3)

Structural analysis of two types of triangles on the tension structure
7. Robot Structure Design
The robot is designed according to the analysis of the principles of tensioning structures, and there are a total of three structural units on the robot: the main support bar, the bellows that is driven to contraction by an air pump, and the secondary support bar.

Expandable bellows
Pneumatic Device
Making a pneumatic device out of bellows and a small air pump to drive the tensioning structure.
Examining the effect of the air pump pulling the object and establish a relationship between the temperature collected by the temperature sensor and the amount of air pumped.
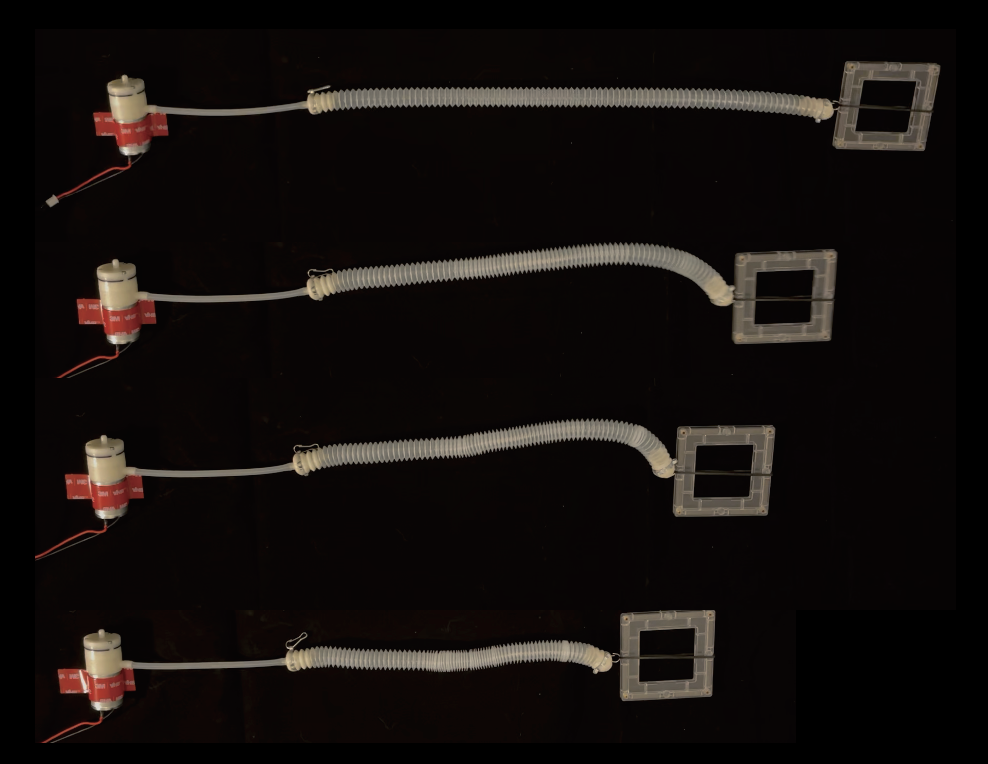
Pneumatic device dragging object experiment
8. Hardware Development


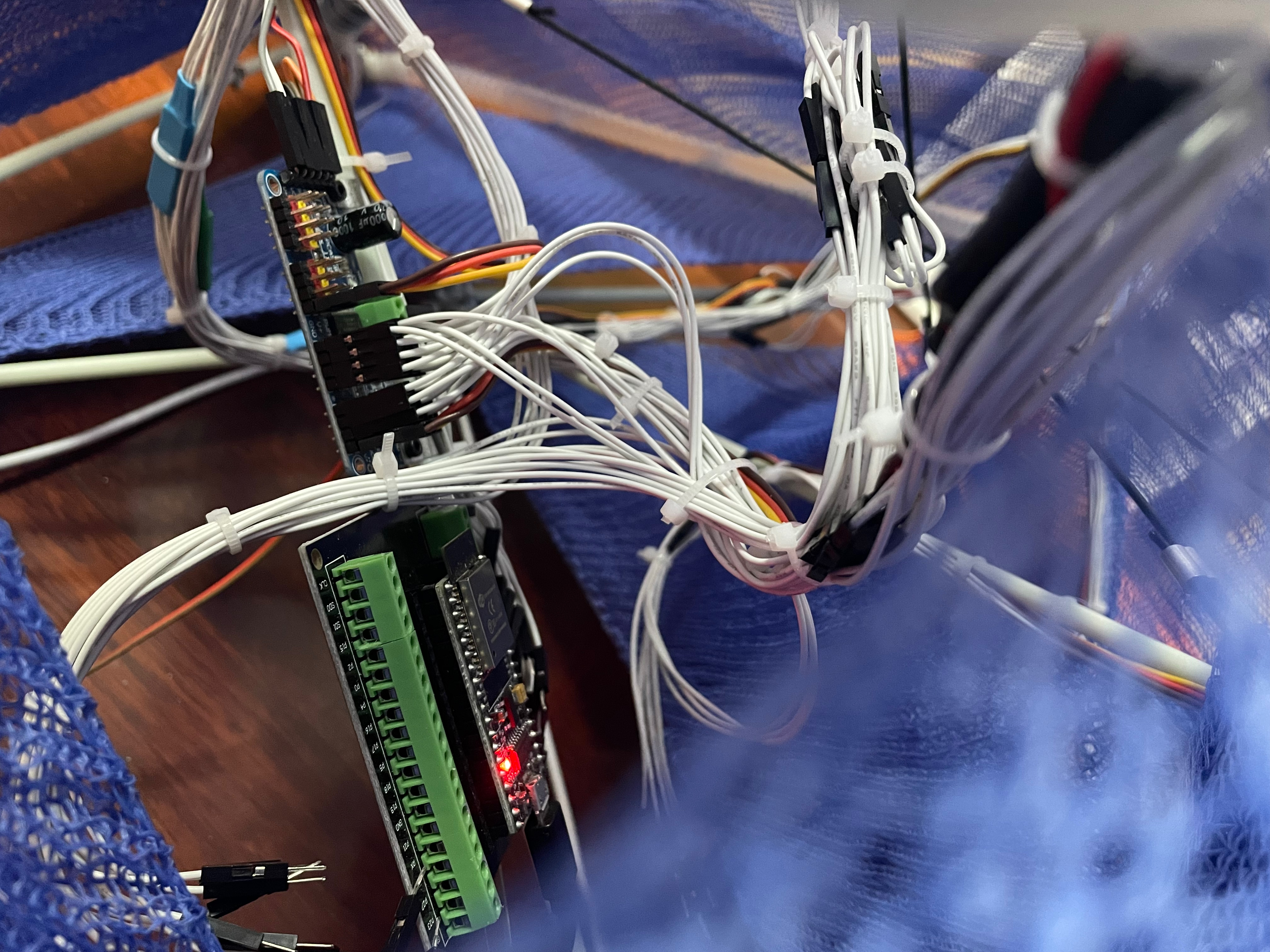
Temperature sensor data control air pump:
The temperature sensor regulates pumping capacity by collecting ambient temperature data, with pumping capacity decreasing as temperature rises and increasing as temperature falls.

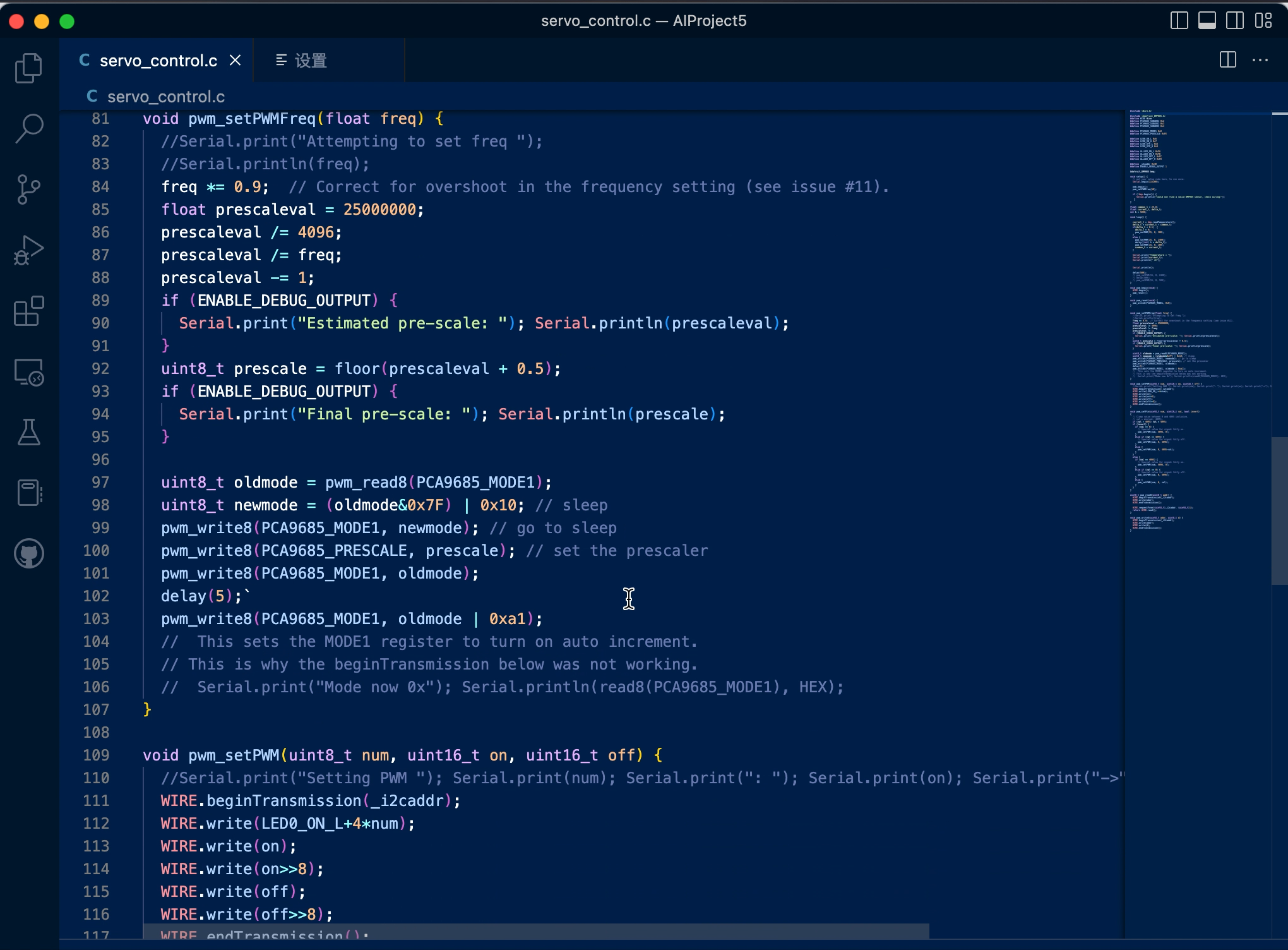
Electronic components wiring diagram
Part of the code for the temperature sensor to control the operation of the air pump
9. Knitted Fabric
Fabric movement mechanism
Fabric edges are classified into two types: shrinkable and fixed length. The fabric's movement mechanism corresponds to the tensioned structure.

Design and manufacturing tools

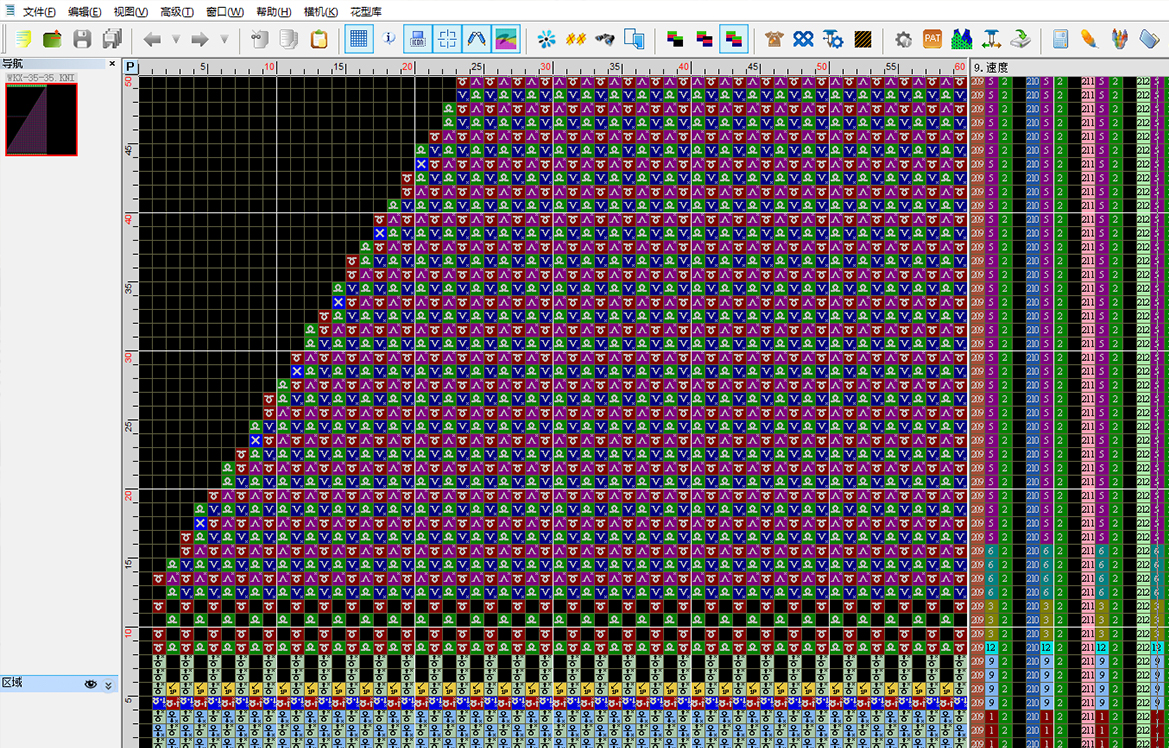
Fabric development using hand crank knitting machine
Mass production of knitted fabrics on digital knitting machines
Fabric hole area varies according to temperature

Final Demonstration
The ambient temperature decreases, the pneumatic device shrinks, the fabric pore area becomes smaller, and the room temperature increases; and vice versa.

︎︎︎BACK NEXT︎︎︎