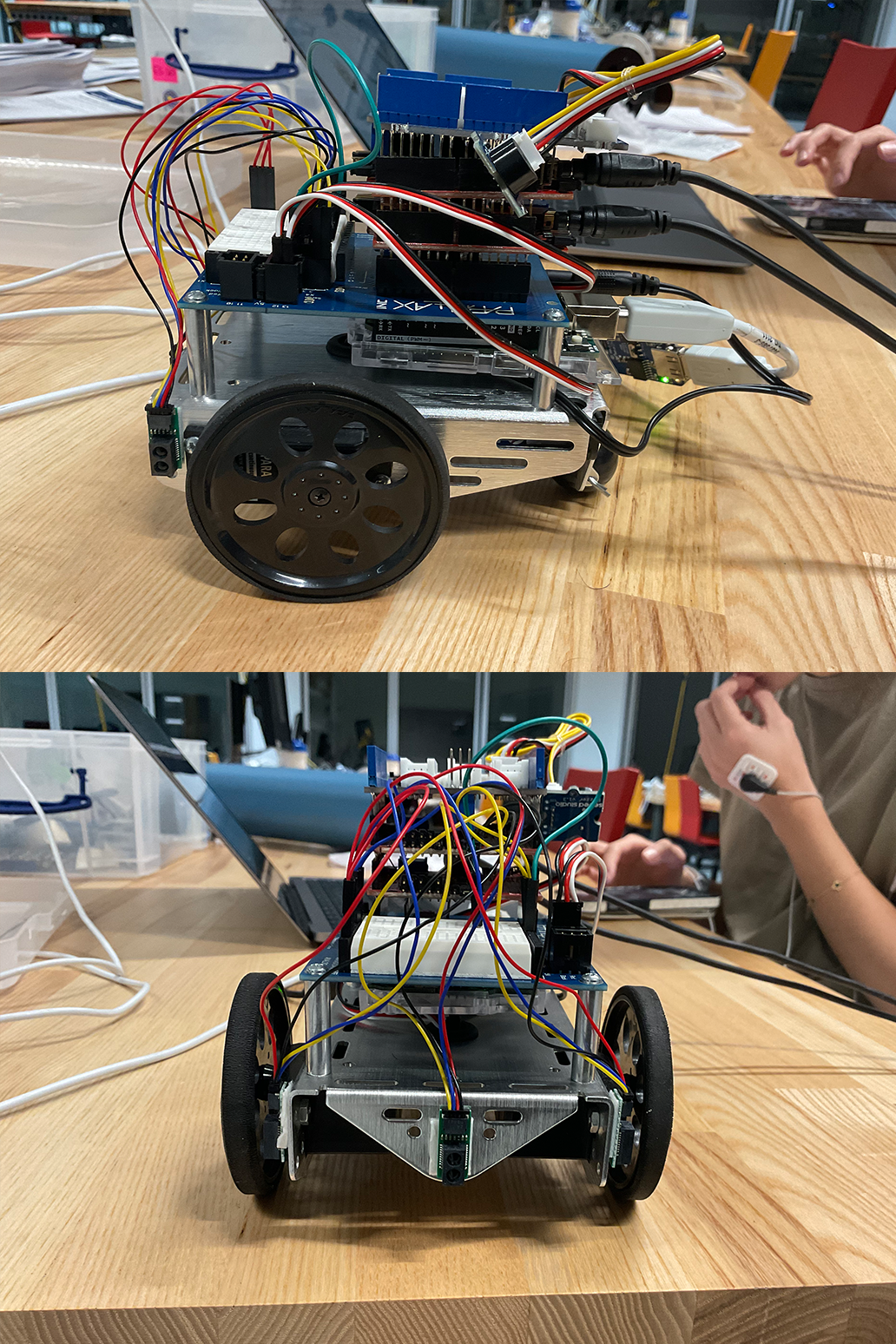
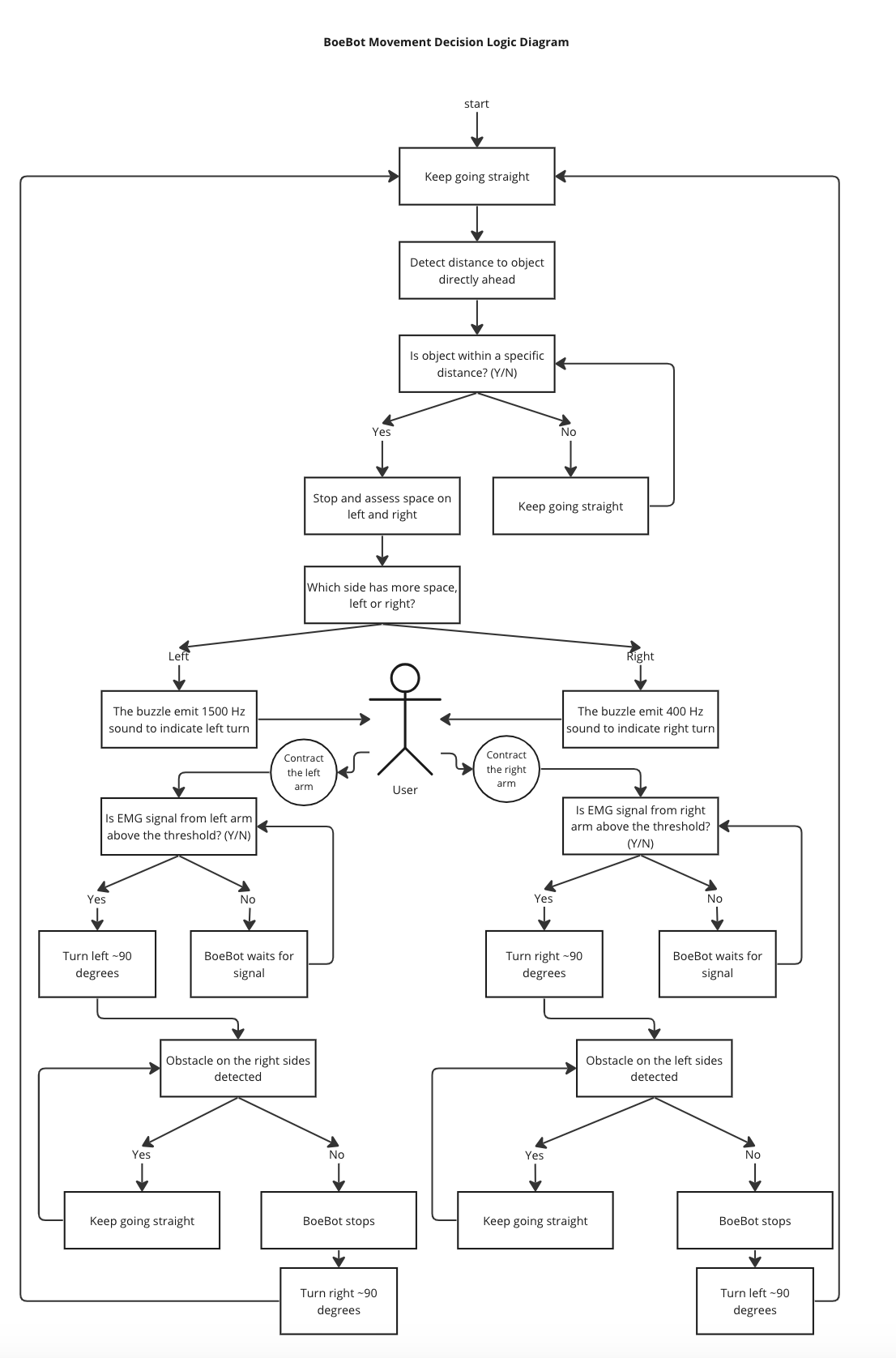
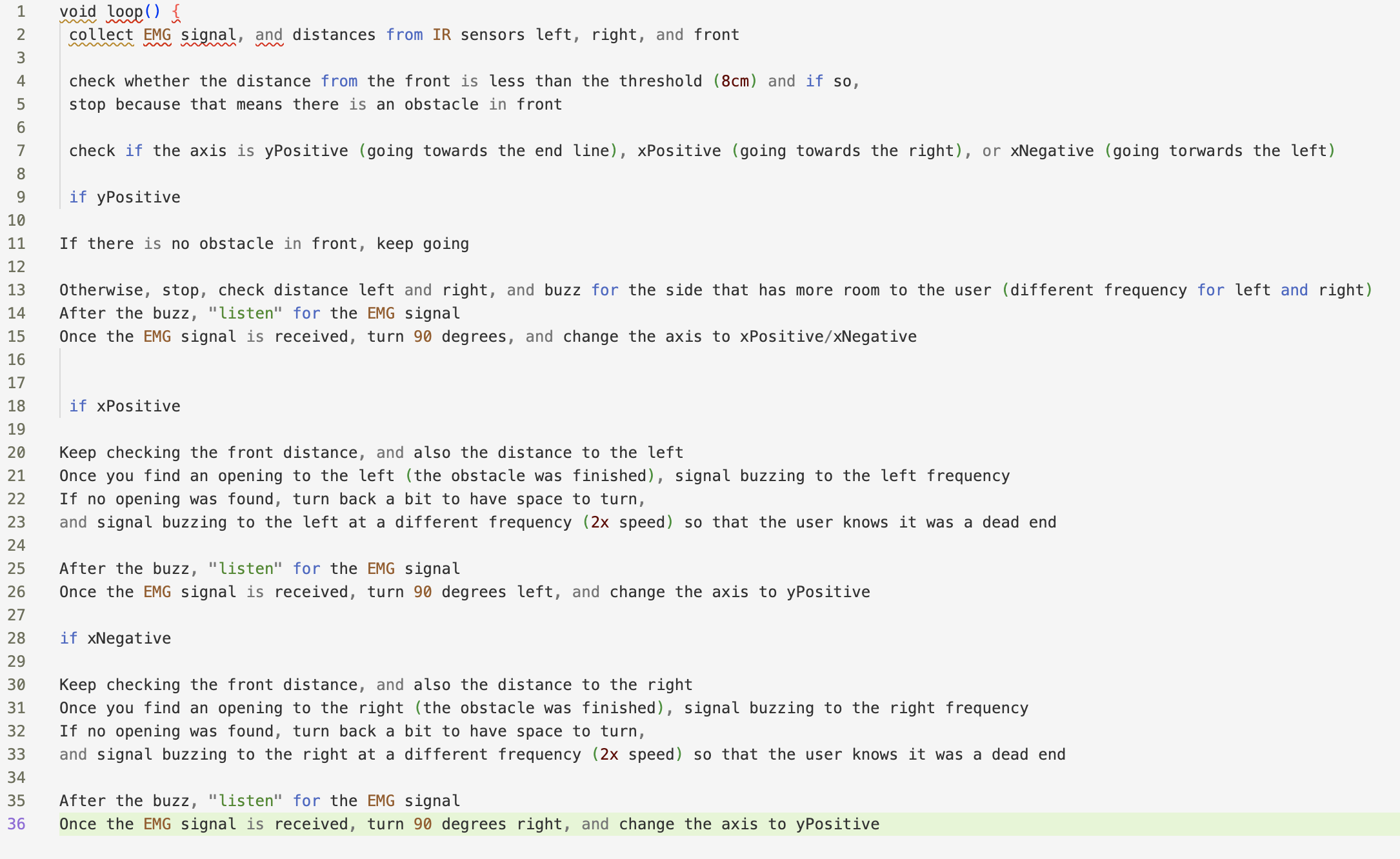
Our plan was based on using auditory feedback to guide the movement and direction of the BoeBot. We equipped the BoeBot with IR sensors on its front, left, and right sides. When the BoeBot approaches a boundary directly ahead within 8cm, it stops and evaluates the available space on both the left and right sides. If a larger space is detected on the right side, the buzzer emits a 400 Hz sound, indicating a clear path and signaling the user to contract their right arm, which turns the BoeBot. The contraction of the user’s right arm generates an EMG signal above a certain threshold which causes the bot to turn approximately 90 degrees to the right. Conversely, if more space on the left side, the buzzer emits a 1500 Hz buzzer sound emission, guiding the user to contract their left arm. This action produces an EMG signal that directs the BoeBot to turn left.
After turning, the BoeBot continuously checks for obstacles on the side where one was previously detected to determine when it passes the obstacle. Once it passes the obstacle, the bot stops and signals to the user to turn (either left or right, to realign with the forward path).
Overall, this frequency-based auditory feedback explicitly directs the user's movements, providing a clear and intuitive control mechanism.